

|
|
|
Главная страница Системы автоматического управления где использовано соотношение для всех п. В пределе можем записать 8u{t) (8.75) где [lo (i) - единичный импульс при t = 0. Уравнение (8.75) вместе с соотношениями для переменных 8и (/), ду (t) и бг (/) описывает импульсную систему управления, изображенную на рис. 8.15. 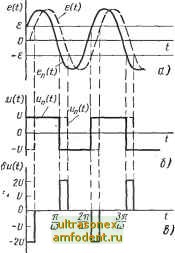 eft) e(t) e(t) -£ ejt) e(t) Рис. 8.13. Виды сигналов е (t), et), и (f), и (t) и ёи (t) при действии малых возмущений на релейные системы управлений Рис. 8.14. Соотношения между ёе (-1 и шириной пульсации а - при перемючении реле с (-) на (+); б-при переключении реле с {+) на (-) Докажем теорему. Теорема 8.2. Для системы управления, включающей реле без зоны нечувствительности (см. рис. 8.1), устойчивость автоколебаний (входной сигнал r(t) = 0) или внутренних колебаний при периодическом входном сигнале {t) равносильна устойчивости линейной дискретной системы (рис. 8.15). Отметим, что период прерывания импульсной системы (рис. 8.15) равен т - = Тогда обратное модифицированное 2-преобразование с опережением равно (8.76) Для m = О - функция S (г, т) переходит в функцию (г), определяемую выражением (8.62). На основании теорем 8.2 и II.4 приложения II сформулируем следующую теорему. Теорема 8.3. В системах управления (см. рис. 8.1) с реле без зоны нечувствительности при условии, что 1) линейный элемент описывается обыкновенным дифференциальным уравнением с постоянными коэффициентами и является полностью управляемым и наблюдаемым; 2) для любых т функция (2, т) имеет те же полюсы, что и функция (2, 0) = (2); 3) все нули функции 1+ fix S{z) = 0 . (8.77) лежат в области 2 < 1 ( z> 1), автоколебания или вынужденные колебания асимптотически устойчивы (неустойчивы). ffr(t) few j ffg(t) Линеаризованное реле I при палых кследательных I возпущениях С(Р) Sy(t) Рис. 8.15. Структурная схема дискретной системы, эквивалентная релейной системе управления, показанной на рис. 8.1 Заметим, что условия 1) и 2) в формулировке теоремы 8.3 удовлетворяются в большинстве практических задач. Если все кор ни уравнения (8.77) лежат внутри круга \z\ < 1, за исключением одного или более корней при I z = 1, то так же, как и при анализе на основе первого метода Ляпунова, здесь требуются дополнительные исследования. Раз допускается, что g- (0) = О, то можно к исследованиям привлекать критерий устойчивости, основанный на использовании функции Цыпкина J (со). Из выражения (8.65) имеем (8.78) G*(/co) = --ReJ(co). Рассмотрим теперь случай, когда все полюсы передаточной функции G (s) расположены в области Re s <; О, за исключением, быть может, простого полюса при 5 = 0. Для импульсной системы управления, изображенной на рис. 8.15, амплитудно-фазовый критерий устойчивости требует выполнения условия G*(/co)>-1. (8.79) Это означает, что Rey(co)>-1 Re/(co)>- (8.80) Условие (8.80) можно использовать для определения устойчивости вынужденных колебаний, когда они являются двухчастотными; например, в случае, показанном на рис. 8.12, б, где -Ф)+ /( )}, (8.81) (8.82)
Рис. 8.16. Годограф / (со) и линия - е. В точках и cOg наблюдаются устойчивые колебания, а в точке со 2 - неустойчивые со \ со / со поэтому условие (8.80) превращается в Re / (соо) > - I Re [i? (я - Ф) + У (соо) j А условие устойчивости удовлетворяется только тогда, когда Re Ш (я - Ф) + / (соо) ] < Re7 (соо). Таким образом, для случая, показанного на рис. 8.12, б, вынужденные колебания при Ф устойчивые, а при неустойчивые. Вообще колебания, определяемые пересечением кривой R (я-Ф) с линией - е, лежащей влево от точки J (соо), всегда будут устойчивыми. Если же эта точка пересечения лежит вправо от точки J (cdq), то колебания будут неустойчивыми. Сделаем общее заключение о свойствах вынужденных колебаний в системе управления с реле без зоны нечувствительности по методу Цыпкина. 1) Условия существования вынужденных колебаний: Re [/?(я-Ф) + У(соо)] <0; Im [R (я - Ф) + У (соо)] = -е. . 2) Условие устойчивости: Re [R{n-0) + J (соо) ] < Re/ (соо). 3) Условие неустойчивости: Im [i? (я - Ф) + J (соо) ] > Re У (соо). К сожалению, вышеприведенные зависимости не позволяют судить юб устойчивости автоколебаний, когда R (п-Ф) = О, и условие (8.82) вырождается. Таким образом, случай автоколебаний требует дополнительного анализа в окрестности точки z = -1 единичного круга для характеристического уравнения (8.77). В этом случае имеем следующую теорему. Теорема 8.4. Рассмотрим релейную систему (см. рис. 8.1) при г (/) = О с реле без зоны нечувствительности, полностью управляемую и наблюдаемую с линейным объектом, имеющим передаточную функцию G (s) с полюсами Re S <: О, за исключением, быть может, простого полюса s = 0. Если ам ;>0 в точке, где У (со) пересекает линию Im У (со) = -е, то автоколебания не только устойчивы, но и обладают свойством орбитальной асимптотической устойчивости. Доказательство этой теоремы приведено в гл. 11. Для случая, показанного на рис. 8.16, автоколебания при со и сод устойчивы, а при cog неустойчивы. Используя метод Цыпкина, нетрудно определить необходимые условия существования субгармонических колебаний *. * Заинтересованный читатель может ознакомиться с этими результатами в работах 1173] и [60].
|
||||||||||||||
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |