

|
|
|
Главная страница Системы автоматического управления Уравнение (8.48) показывает, что для данной частоты со функция J (со) может быть построена по амплитудно-фазовой частотной характеристике G (/со) путем сложения векторов G (/со): ReG(/.3coi) + /iHlM:; IwG(ju) ReG(/.5coi) + /lHGp i). и т. д. Это построение показано на рис. 8.7. Для любой реальной системы значения действительных и мнимых частей функции G [/(2п - 1) со] становятся малыми после нескольких членов. Построив график J (со), можно определить основную частоту колебаний со, по уравнению (8.45), как показано на рис. 8.6. Если берется только первый член ряда (8.48), то условия (8.45) сводятся к соотношениям, которые возникают при использовании эквивалентной передаточной функции. Действительно, допустим, что справедливо условие y(co)sG(/co), (8.49) которое на практике верно для больших величин со. Выражение (8.49) соответствует приближенному значению 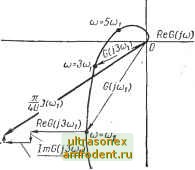 ynit) = ~\G (/со) I Sin [со + е (со)], (8.50) 5 .ReC(j5cj,) Рис. 8.7. Построение годографа Цыпкина / (ш) на основании амплитудно-фазовой частотной характеристики и выражения (8.48) где о (со) = arg G (/со) (8.51) Из условия переключения (8.45) следует, что на частоте колебаний со о справедливо соотношение G(/coo)sin[e(cOo)] = --е или sin [О (соо)] = --щ Пусть г/о = {- I G (/f) I представляет собой амплитуду первой гармоники колебаний выходного сигнала (t). Тогда sin [О (соо)] =--и О (соо) == = л -f- arcsin \ У о . Поэтому G(/cOo) = C(/coo)exp [/е(соо)] = -exD 4U / arcsin- Уо J (8.52) Условие (8.52) при использовании аппроксимации (8.49) совпадает с необходимым условием, полученным при использовании метода эквивалентной передаточной функции, т. е. G(/coo) = -, (8.53) Niyo) -/arcsin- эквивалентная передаточная функция для реле с гистерезисом, определенная ранее в § 6.3. Теперь рассмотрим систему управления с реле, обладающим гистерезисом и зоной нечувствительности. И в этом случае пригоден метод Цьщкина, хотя условия, вытекающие из его применения, становятся более сложными. Здесь приходится пользоваться двумя функциями Цыпкина, которые можно представить в следующем виде: А И = (-) - ]Уп (-); ЛИ = -~ к (т -)-1уп (т ). (8.54) Если соо - частота автоколебаний, то условия переключения при использовании функции Ji (со) и Уз (й) следуют из выражений (8.43 б) и (8.54): Im Ji (соц) = -е; Im (со,) = Я,; Re Л (соо) < 0; Re Л (соо) < 0. (8.55) Заметим, что в соотношениях (8.55) ограничения, налагаемые на функцию Jl (со), совпадают с неравенствами для функции J (оа) для реле без зоны нечувствительности. Однако из-за разных форм периодических процессов на выходе реле функции J (со) и (со) не являются тождественными. Для того чтобы получить выражения для (со) и (к ), используем тот же подход, как и при отыскании функции J (со). Определим у (i) как функцию от со. Тогда для случая симметричных г(0 = 0;Fo = 0;a = -i-;T = 2раир,= колебаний НИИ (8.19 а) и (8.40) следует 2(1 + Y) J из выраже- П=-СО Следуя процедуре вывода формулы (8.46), получим п=\ со у () = -со 2 ReG[/(2n- 1) со] [1 - e~/ (2 -i)v] (8.56) Заметим, что в частном случае, когда у = 2pi = 1, выражения (8.55) приводятся к выражениям (8.46). Последнее следовало ожидать, так как это соответствует нулевому значению зоны нечувствительности. Для t = t = получаем из выражения (8.56) следующие формулы: (1=1 У-Ь) = 2 Re(Gl/(2n- l)cD][l-e/-(2 -i)v]}. Сравнивая выражения (8.57) и (8.54), получим 1ш у. (со) = I; !lEKib Re G [; (2n- 1)со] + +A.i;?ibIniG[/(2n-l)co]}; Re Ji(co) = 2 {[] -cos(2n- \)yn\ ReG[j{2n- l)co] - - sln[(2n-1)71 ImG[/(2n-1) coj); Im (co) = 2 ( tll- GI/ (2n - 1) co] - Re is (со) = 2 {[ 1 - cos (2n - 1) yn] Re G [/ (2n - 1) со] + + sin[(2n- l)Yn]ImG[/(2n- l)co]). Следует заметить, что Ji (со) и (со) зависят как от G (/со), так и от параметра у. Более того, из выражения (8.58) следует, что построение (со) и (со) даже при заданном значении у представляет задачу более сложную чем построение J (со) для реле без зоны нечувствительности. Для того чтобы найти два параметра coq и у, необходимо использовать выражение (8.55). Способ определения сОо и у при помощи графиков (со) и /г (со) достаточно прост и аналогичен применению эквивалентной передаточной функции для двухчастотного входного сигнала при анализе управления с несимметричными безынерционными нелинейностями. Для этого построим семейство функций 1 (со) аргумента со,.где у является параметром. Каждая из точек пересечения одной из этих кривых с линией Im (со) = -е дает два значения cOq и y, которые определяют кривую со (у).
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |