

|
|
|
Главная страница Системы автоматического управления Определим (открытое) множество § как множество всех точек х таких, что Xi = Si, i = \, . . ., т, и, кроме того, х < х (и*, t. Множество § является выпуклым и представляет собой выпуклое множество, не имеющее общих точек со множеством G (t). В нашем примере множество § рассматривается как полубесконечное пространство, определяемое Xi = и х <i х (и*, t). Поперечное сечение этого множества приведено на рис. 14.6, где через точку л: (и*, t) проходит плоскость, параллельная плоскости (хо, Xi). Кроме того, определим множество § как множество всех состояний л: в пространстве где л:,- = s, при i = 1, . . , т, и, кроме того, Хд Хо (и*, г)- Таким образом, множество § представляет собой множество § и его граничную плоскость Хо=Хо (й*, t). В нашем примере § представляет собой множество S и его граничную плоскость, определяемую х = Хд (и*, 2); = St. В соответствии с определением множества G (2) и не имеют общих точек, так как в противном случае было бы нарушено предположение о том, что и* является оптимальным управлением. Так как G (2) и выпуклы и не имеют общей точки, то существует по меньшей мере одна гиперплоскость, разделяющая их: т. е. множество G (/g) целиком располагается по одну сторону от этой гиперплоскости, а § целиком лежит по другую сторону. Вид этой плоскости с ребра показан на рис. 14.6. Фактически она представляет собой опорную плоскость множества G (t), проходящую через точку л: (и*, 2)- Расстояние до плоскости от начальной точки определим как евклидовое расстояние г. Тогда внешняя нормаль ij к опорной гиперплоскости, направленная в сторону от G (t), обладает следующими свойствами: 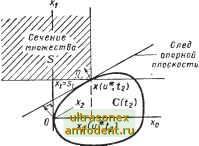 Рис. 14.6. Геометрия выпуклого достижимого множества, относительно множества G {t для особого класса систем, уравнения (14.43) (xil) Так как х (и*, t) принадлежит ~г, для всех л:£(3(2); >г, для всех х£8; г, для всех х§. (14.46) и к G{t) и к , имеем х (и*, t) 11 а это означает, что {и*, tz) 11 llllll ~ (14.47) (14.48) Заметим, что любое перемещение точки л: (и* {t), параллельно оси х оставляет ее внутри множества § (где 2 - координата, которая остается свободной в момент времени 2)- Применительно к расширенному пространству п+х этот факт можно использовать для доказательства, что r\i = О при i = т + \, . . ., п и т]о<0. Пусть Bi представляет собой единичный вектор, параллельный i-й оси, тогда л: ( *, /g) + и л: ( *, 2) - принадлежат множеству при г = m + 1, . . ., п. Из соотношений (14.46) и (14.48) получим {X( *, ,) + ецх(и*, U) 1] (14.49а) (л:( *, 2)-eiYцх( *, 2) 1], г = m + 1, п, (14.496) а это означает - 0<е1гК0 e?il = 0, (14.50) что возможно только в том случае, если т],- = 0; г = m + 1, . . . , п. Заметим, что л: ( *, 2) - принадлежит к множеству §. Поэтому в соответствии с соотношением (14.46) имеем л: [и, h) - еоУ цх [и, h) ц; (14.51) отсюда - воц О, а это означает, что Теперь покажем, что если получены сопряженные векторы (0в соответствии с 4(0 - [Ф ( 2)]!] = Ч( t,)ri (14.52) для 1 = 2. то можно доказать пункты 1) и 2) формулировки принципа максимума. В выражении (14.52) Ф (?, 2) представляет собой переходную, матрицу расширенной системы, а W (t, t,) - переходную матрицу соответствующей сопряженной системы. Сначала можно доказать (см. упражнение 14.14), что (t, tdg t)Yn{0- (t, t,)g{u, t)Yri, (14.53) откуда следует, что g{n, t)W{t,t2)ri>g4u, t)W{t, tri. (14.54) С учетом выражения (14.52) запишем g[{n, t)ip{t)g{n, t)ip{t). (14.55) Добавив (A {t) X* it)y (t) к обеим частям неравенства, получим (А (t) X* (t) + ( *, t)f Я1,(t) (A (t) л:* (t) + g( , 0)4(0 H{x*, *, t, );H{x*, u, t, ij,) для всех teih, У, (14.56) что представляет собой первую часть формулировки принципа максимума. Кроме того, из выражения (14.52) для всех t£ И t] имеем = A.Wit, t,)n-A{t)W{t, 2)г] = -40(О- (14.57) уравнение (14.57) представляет собой вторую часть формулировки принципа максимума. Оно показывает также, что (t) - сопряженный вектор. Кроме того, так как Ч? (2. 2) = I, то из выражения (14.52) следует, что 1] = 1з (2)- Таким образом, т]. = О при г = m + 1, . . ., п и т]о 0. Этим завершается доказательство условий 3) и 4) принципа максимума. 2. Доказательство принципа максимума в нелинейном случае В общем случае доказательство оказывается значительно сложнее. Результаты, полученные для линейных систем, можно использовать применительно к общему случаю, если воспользоваться свойствами траекторий, граничащих с оптимальной траекторией. В формулировке задачи, изложенной в п. 2 § 14.3, примем, что х(и*, t) представляет собой оптимальную траекторию в расширенном пространстве [сокращенно л:* (t)], ах (и, t) [сокращенно х (t)] обозначает траекторию, получаемую в результате применения любой другой допустимой функции управления u(f}. Разность бл: ( , t) х (fj-х* (t), называемую вариацией траектории и сокращенно обозначаемую как 8x(t), найдем из выражения б.: = /(л:. и, t)~fix\ *, t). Предположим, как и в гл. 5, что мы определили матрицу Якоби -dfx dfx Ж. дх (х*, и*, t) =  дхп и пусть §() g{u, t)Afix*, и, t)-fix*, *, t). Тогда, подставляя бл: (t) = дх дх (t) и g [и, t), получим {t)T8x{t)+g{u, t) + h{x, и t). (14.58) /1{х, и, t) = fix, п, t)-f{x*, *, t)-g{u, t)- 1(0]*бл:(0. Заметим, что h (х, и, t) будет мала , если будут малы векторы и (t) - -и* (t) и л: (О - X* (0. Так как бл: (i) = О, то бл: можно точно найти, используя переходную матрицу Ф [t, tj), соответствующую системе бл: = (t) Ъх; поэтому бл:( , 0 = i)l(b T)(g( , т) + А(л:, , т))т. Предположим, что мы определяем приближенную вариацию бл:1 из системы 61 ( . 0=Г(0 8xi(t) + g(n, t). (14.59)
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |