

|
|
Главная страница Системы автоматического управления 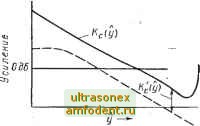 Следовательно, задача нелинейной стабилизации заключается в том, чтобы найти такую нелинейную функцию е = f (ej), эквивалентный коэффициент передачи (Sj) = N (у) которой располагается ниже кривой Кс {у), но не слишком низко, чтобь] обеспечить удовлетворитель-иую точность Для нашего примерарассмотрим тpиfнeлинeй-ных функциональных элемента, показанных на рис. 6.27. Их эквивалентные передаточные функции изображены на рис. 6.24: кривые а), б) к в). Все три кривые расположены ниже кривой Кс {у), определяющей существующий запас устойчивости по амплитуде. Рис. 6.24 показывает, что простое корректирующее устройство в виде нелинейного элемента с ограничением а) всегда обеспечивает удовлетворительное решение. Для больших амплитуд коэффициент усиления разомкнутого контура можно увеличить, вводя вместо ограничителя а) нелинейный элемент б). Нелинейный элемент е) позволяет осуществить большие усиления при малых амплитудах за счет уменьшения усиления при больших амплитудах. Таким образом, звено б) целесообразнее вводить, если предполагается, что система будет в основном работать в области больших амплитуд, а звено е) в том случае, когда амплитуды малы. Данная интерпретация построена на эвристической основе, поскольку сам метод гармонической линеаризации требует более строгих обоснований. Таковыми могут быть результаты моделирования. И все-таки указанный подход достаточно разумен и весьма привлекателен на практике. Авторы с большим успехом использовали его при работе с достаточно сложными системами, встречающимися в промышленности. Однако в этой области еще предстоит провести огромную аналитическую и практическую работу. Рис. 6.26. Запасы по амплитуде для систем с нелинейным корректирующим устройством и без него в децибелах (дб) и эквивалентный коэффициент передачи нелинейного корректирующего устройства: 1с ~ запас устойчивости по амплитуде для системы без нелинейного корректирующего устройства; Кс 1у) - запас устойчивости по амплитуде с нелинейным корректирующим устройством; эквивалентная передаточная функция линейного корректирующего устройства обозначена штриховой линией e-ffe,) 3 3 е,
Рис. 6.27. Три типа характеристик нелинейных корректирующих устройств для системы, рассматриваемой в примере 6.9. Эквивалентные коэффициенты передачи нелинейностей показаны на рис. 6.24: а - типа ограничения с наклоном й, = 1; б -с двумя наклонами характеристики ki =1, 2 = 0,020; в - с двумя наклонами характеристики = 1, Аз = 0,028 Главное-это получить кривую запаса по амплитуде в реальной нелинейной системе. В следующем параграфе мы покажем, как можно это сделать и притом достаточно просто, зная частотные характеристики нелинейной системы. 6.7. АНАЛИЗ И СТАБИЛИЗАЦИЯ СИСТЕМ УПРАВЛЕНИЯ ВЫСОКОГО ПЙНГЯДКА Опыт проектирования систем управления выявляет следующее: как только порядок системы начинает измеряться десятками и выше, большинство методов оказываются неприемлемыми. У инженера остается еДвн- ственный выход - проектировать линейную систему и тем самым оградить себя от непредвиденных неприятностей. Однако такой метод проектирования не всегда соответствует поставленной задаче. Тогда единственно возможным методом, который теоретически пригоден и для системы высокого порядка, является метод эквивалентной линеаризации.. Мы говорим теоретически , потому что в системах высокого порядка вероятность аномальных явлений увеличивается и опасность получения неверного результата при использовании эквивалентной линеаризации также возрастает. Одной из важнейших характеристик системы высокого порядка является ее поведение в режиме автоколебаний. В большинстве систем можно вызвать колебания; наблюдая затем амплитуду, частоту, а иногда и форму этих колебаний, можно сделать важные выводы о работе такой системы.
N(y) = контур y(t)ysinuji,t Система или модель системы .Ррс. 6.28. Возбуждение колебаний для анализа и стабилизации сложных систем управления: а - KOHTyf для измерений; б - введение в контур для измерений идеального реле Очевидный способ выявления аномального поведения системы - это увеличение одного из её коэффициентов усиления, скажем К, от расчетного значения Ко ДО Ki, при котором в системе возникают автоколебания. Когда автоколебания установятся, надо медленно понижать усиление. Как правило, величина коэффициента усиления, при котором колебания исчезают, равна /Сг < Ki- Но иногда К?, даже меньше Ко- Это означает, что в расчетных условиях система устойчива лишь в малом и неустойчива в большом, и, следовательно, любое сколько-нибудь значительное возмущение вызывает в системе колебания. Это верный признак того, что система рассчитана неверно. Примером такой системы может служить система, рассмотренная в последнем разделе. Нет необходимости говорить, что если во внутреннем контуре системы возникает скачкообразный резонанс (ем. § 6.5), то изменения в поведении системы еще значительнее. Простой способ проверки, изложенный выше, не позволяет выявить полную картину устойчивого и неустойчивого поведения. Амплитуда и частота колебаний вероятнее всего определяются уровнем насыщения * линейного элемента с усилением k, если только этот уровень не настолько велик, что некоторые из элементов системы входят в насыщение раньше. Поскольку мы уже выяснили, что устойчивость системы удобно определять исходя из запаса устойчивости по амплитуде, то сейчас мы предложим простой способ отыскания последнего. : Рассмотрим сложную систему управления, в которой сигнал одного из контуров пригоден для измерения (рис. 6.28, а). Поместим в этот контур идеальное реле с уровнем U (рис. 6.28, б). Почти определенно в такой системе возникнут колебания простой формы**. Сделав те же предположения. . j.-. ;* Вея.кий-реалЬный усилительный.элемент имеет, некоторый уровень насыщения. ** См. гл. §, в ко,то]рой рассматриваются релейные системы. которые свойственны методу гармонической линеаризации, будем считать, что на входе реле сигнал имеет форму у sin соц *. Эквивалентный коэффициент передачи реле для амплитуды .обеспечивает такое усиление, что в контуре возникают автоколебания амплитуды у. .Следовательно, эквивалентный коэффициент передачи реле определяет запас устойчивости по амплитуде Кс (у) в зависимости от амплитуды автоколебаний у. Поскольку эквивалентный коэффициент передачи реле равен -, то график этой величины в зависимости от у для различных уровней реле U позволяет построить требуемую кривую запаса устойчивости по амплитуде. Следовательно, указанный способ проверки, который мы будем называть проверкой системы на автоколебания, позволяет получить зависимость амплитуды колебаний у от уровня реле U. По этим данным можно построить эквивалентный гармонический коэффициент передачи реле в зависимости от амплитуды входного сигнала, или Кс (у) = в зависимости от у. Тале/ - КИМ образом, кривая, подобная кривой Кс. (у) на рис. 6.26, может быть по- .лучена при проверке системы на автоколебания. Типовая зависимость у ют и показана на рис. 6.29. При выполнении проверки системы на автоколебания можно определить и частоту автоколебаний со о для каждого значения амплитуды у, воспользовавшись осциллограммами. В линейной системе частота со о определяет частоту, при которой фазовая характеристика разомкнутой системы равна -180° и одновременно дает грубую оценку полосы пропускания замкнутой системы **. Развивая такой подход на нелинейные системы, можно говорить сО частоте со о, при которой фазовый сдвиг первой гармоники эквивалентной передаточной функции разомкнутой системы равен -180°. В рассматриваемом случае частота со о является функцией от амплитуды колебаний. Эта частота также может быть определена без труда в процессе проверки системы :на автоколебания (т. е. с помощью возбуждения в ней автоколебаний). Например, для системы, показанной на рис. 6.20, кривая /о в зависимости ют у, полученная в результате возбуждения автоколебаний ( автоколебатель-.ной проверки ), изображена на рис. 6.30. Невозможно найти какую-нибудь приемлемую интерпретацию кривой /о = fo (у)- В частности, нецелесообразно ее трактовать fo (у) в смысле полосы пропускания для разных амплитуд. И все-таки эта кривая позволяет оценивать переходные характеристики системы. Например, мы можем рассматривать как меру времени переброса системы, т. е. такого времени, которое требуется, чтобы выходной сигнал изменился от у до -у. Однако .всякая точная оценка процесса должна исходить из переходной реакции .реальной системы или ее модели. * Сигнал у (t) в процессе колебаний, как правило, осциллографируют для проверки, что он синусоидален (т. е. у (t) = у sin (ot). ** Необходимо быть очень осторожным в установлении такой связи между частотой среза .замкнутой системы и частотой /о разомкнутой системы. Эти частоты вовсе не .всегда оказы-.ваются близкими. . ,
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |