

|
|
|
Главная страница Системы автоматического управления 4. Дельта-метод Этот метод наиболее приспособлен для получения отдельной траекто-. рии. Пусть система описывается уравнениями вида Xi =. х; = -/ {xi, х). (4.43) Добавляя и вычитая во втором уравнении величину cooXi, получим Xi= Х2, х2 = -alxi - 6 {х, х). б (Xi, Ха) = f (Xi, Xs )- oilx: (4.44) (4.45) Снова предполагаем, что б (х, х) постоянна в малой окрестности точки {Xi, Xj) на фазовой плоскости, тогда  cjoX, (4.46) и при интегрировании получим (с условием, что 6 - постоянная величина) -g- Л--2 + 1 Это уравнение можно представить в виде Рис. 4.25. Построение фазового портрета с помощью дельта-метода б (Xi.Xa) = i? (4.47) Данное соотношение означает, что малый участок траектории вблизи точки (cooXi, Xg) можно заменить дугой окружности радиуса R с центром в точке б (Xi, Ха) р если в качестве фазовых координат принять координаты (WoXi, Xg). Построения, связанные с дельта-методом, приведены на рис. 4.25. 5. Метод Пелла Метод Пелла * [157] целесообразно использовать для построения отдельных траекторий автономных систем второго порядка, которые можно описать уравнением вида ** х + g (х) + / (х) = 0. Для этого класса систем, полагая Xi = х, Ха = х, получим Ас2 ~gte) - / (%) dxy % * И в этом случае цель остается прежней: отыскать наклон в заданной точке (Xj, Ха). После того как построен малый orpesfOK с заданным наклоном, * В отечественной литературе этот метод чаще называют методом Льенара (Прим. ред.). ** Этот метод можно развить и на системы более общего вида. См., например, работы [166] и [195]. (4.48) аппроксимация траектории в этой точке заканчивается, и следует перейти к следующей точке. Для нахождения воспользуемся следующим приемом: 1. Используем отрицательную полуось для построения кривой g (х), а отрицательную полуось для построения / (xj), как это показано на рис. 4.26. 2. Из произвольной точки плоскости (а, Ь) опустим на оси х и Ха перпендикуляры и продлим их до пересечения с кривыми g (Ха) и / (Xi), как показано на рис. 4.26. 3. Откладываем отрезок длиной \[{а)\ вдоль оси Xl из точки а в отрицательном направлении, если ордината / (а) положительна, и наоборот. Получим точку С. 4. Из точки С откладываем отрезок длиной \ g {Ь)\ также вдоль оси Xi в отрицательном направлении, если ордината g (b) положительна, и наоборот. Получим точку D. 5. Точку D соединяем прямой линией с точкой {а, Ь). Маленький отрезок перпендикуляра к проведенной прямой в точке (а, Ъ) и является участком касательной к искомой траектории. Обоснование этого построения заключается в том, что прямая, соединяющая точку D с точкой (а, Ь), имеет наклон . - Тогда отрезок прямой, перпендикулярный к проведенной линии, имеет отрицательный наклон и точно соответствует правой части уравнения (4.48). 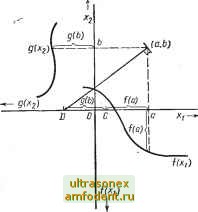 Рис. 4.26. Построение фазового портрета по методу Пелла 4.7. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ ПРОТЕКАНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПО ФАЗОВЫМ ТРАЕКТОРИЯМ Поскольку в основу построения фазовых траекторий заложена идея исключения времени, то после того как они построены, возникает задача восстановить временные характеристики процесса. Рассмотрим три метода, приемлемые для систем вида X = / (X, к). (4.49) 1. Интегрирование выражения - dx==ti - to- (4.50) Это условие достаточно очевидно, и его графическая интерпретация показана на рис. 4.27, а. 2. Интегрирование выражения вида J f {x, x) J dx (4.51) Графически это означает, что мы определяем площадь под кривой f (X.. X) как это показано на рис. 4.27, б. 3. Можно выполнить построения, исходя из графического изображения траекторий. В основе этих построений лежит дельта-метод. Смысл метода заключается в том [см. уравнение (4.44)], что для малой дуги, проведенной вдоль траектории из точки - мы получим X + (ogx + б = 0: (4.52) Тогда на отрезке дуги в угле 6 скорость перемещения фазовой точки, как это следует из интегрирования (4.52), приближенно определяется как  Площадь  Площадь Рис. 4.27. Графическое определение времени протекания переходного процесса по фазовым траекториям, построенным в координатах (х, х): а - на основе уравнения (4.50); б - на основе уравнения (4.51); в - с использованием соотношения (4.52) (i)(,t. И для малых углов 6 справедливо (0о4 = 6; поэтому L = -, где 4 ~ Приближенная оценка времени, необходимого для движения по дуге О (рис. 4.27, в). Если траекторию можно разбить на m дуг с углами 6, Gg, . . ., (рис. 4.27, в), то ясно, что полное время движения по такой траектории равно 4.8. КРАТКОЕ СОДЕРЖАНИЕ Практически любые стационарные системы второго порядка можно с успехом анализировать на фазовой плоскости. В процессе многолетней практики было разработано большое число методов построения фазовых траекторий и способов анализа таких систем.
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |