

|
|
|
Главная страница Системы автоматического управления М(р) (рис. 2.5, б) изображений. Можно систему представить блоком cG (р) А. и считать, что этот блок обозначает те же действия, что и предусматриваемые дифференциальным уравнением (2.14). Другими словами, G (р) - операторное звено, но во временной области. acs) G(s) tics) Y(S) U(tl ri(p-) L(P1 Рис. 2.5. Представление уравнений (2.14) в виде блок-схемы, составленной относительно: с - изображений переменных; б -оригиналов переменных (как функций времени Рассмотрим основные способы получения уравнений в переменных состояния вида (2.8) для систем, описываемых дифференциальными уравнениями (2.12) или (2.14). / 2.4. УРАВНЕНИЯ СОСТОЯНИЯ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ СИСТЕМ, ПЕРЕДАТОЧНАЯ ФУНКЦИЯ КОТОРЫХ НЕ СОДЕРЖИТ НУЛЕЙ Для системы вида (2.14) корни полинома L (р) являются полюсами, а корни полинома М (р) - нулями. Если М (р) сводится к постоянной величине, то можно сказать, что система не имеет членов в числителе, характеризующих динамику, и входной сигнал непосредственно не фигурирует в выражении для выходного сигнала y.{t) [т. е. в уравнении (2.10) имеем d = 01. Для этого случая существует несколько простых методов получения уравнений состояния системы, некоторые из которых рассматриваются ниже, 1. Метод разложения на простые дроби (канонические формы) Без потери общности рассмотрим систему G (р) = /Г описываемую уравнением L(p)y = u. - (2.16) Полагая, что L (р) имеет простые нули, можно написать Ыр) = П ip-xi). (2.17) где Ki - полюсы функции G (р) или корни полинома L Разлагая -ц- на простые дроби, получим (2.18) откуда Если положить и it). (2.19) y(t) = Yi ел it). (2.20) Согласно уравнению (2.19) переменная Xi удовлетворяет следующему дифференциальному уравнению первого порядка: Xi - %iXi = и, i = \, . . ., п. Система уравнений (2.21) эквивалентна уравнению X = Ах Ьи, К о = Л; & = р-Л,
 (2.21) (2.22) (2.23) (2.24) где с - вектор, составляющими которого служат вычеты, т. е. Имеем также У = сх, Рис. 2.6. Структурная схема стационар- -.т , nm /о пл\ ной системы, записанной в канонической Уравнения (2.22) и (2..24), полно- форме стью характеризующие систему, обра- зуют уравнения состояния системы. Описанный метод получения уравнений состояния имеет то преимущество, что связан с получением Л-матрицы, которая, будучи диагональной, значительно упрощает последующие выкладки. Кроме тог, здесь в явной форме фигурируют собственные значения, или полюсы системы. Блок-схема системы, соответствующая уравнениям (2.22) и (2.24), показана на рис. 2.6. Из этой схемы видно, что каждая составляющая функции G (р) представляется отдельной ветвью. Нетрудно видеть, что для применимости метода не обязательно, чтобы все корни были действительными. Если КяХ - комплексные сопряженные корни, то выходные сигналы х к х соответствующих ветвей также будут комплексными сопряженными. Пример 2.3. Рассмотрим систему, описываемую уравнением (р -\- I) у = и. Производя разложение на простые дроби, получим L J I + . где / = V -\. Следовательно, Р - 1 P + i
и с = Необходимо, однако, заметить, что во многих случаях бывает неудобно вводить в рассмотрение комплексные переменные состояния. Одна из причин этого заключается в том, что мы лишаемся возможности представлять систему в п-мерном пространстве состояний, вследствие чего рекомендуется избегать применения мнимых величин при написании уравнений состояния. Поэтому описанное каноническое представление обычно не применяют, если имеются комплексные полюсы. Если система имеет кратные корни, то, как показано ниже, метод разложения на простые дроби остается справедливым. Пример 2.4. Рассмотрим систему, для которой М (р) = 1 и L (р) = (р - .j) (р- Х). В данном случае G(p) = = -Cg.
Блок-схема системы показана на рис. 2.7, а соответствующие уравнения состояния имеют вид выходной сигнал определяется уравнением у = х, где Са LC3 J В общем случае L (р) = (р - Я, О* (р - Х) (Р - К)- (где + + 2 + + kr = п) метод разложения на простые дроби, как нетрудно,-видеть, придает матрице А системы жорданову каноническую форму, т. е. 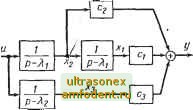 Рис. 2.7. Структурная схема системы, описываемой уравнением (2.4) (2.25) где каждый диагональный элемент Jk. (i) представляет матрицу типа li hn О . . .0 О Ithi О (2.26) где каждый из элементов hn, . . ., hi - или единица, или нуль.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |