

|
|
|
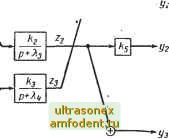
Главная страница Системы автоматического управления тот же порядок, что и знаменатель, то можно воспользоваться методом, изложенным в п. 4 § 2.5. При этом параметры kg, k, . . ., k рассматриваются как функции времени. Можно показать *, что при где G = 1, и М (р, О = S (t) pi, имеем i-l i-m ko{i) = bo{ty, ki(t) = bi{t)- j: S C+bG, ft(Opm(0- (2.44) Здесь символ Cn обозначает число сочетаний из п элементов по г, т. ё. с;; = r\(n-r)l (2.45) 2.8. УРАВНЕНИЯ СОСТОЯНИЯ СИСТЕМЫ ДЛЯ СЛУЧАЯ НЕСКОЛЬКИХ ВХОДОВ и выходов Принимая во внимание все изложенное выше, нетрудно получить уравнения состояния для системы с несколькими входами и выходами. В данном случае для характеристики системы вместо векторов b я с должны использоваться матрицы В п Сщ Пример 2.7. Рассмотрим систему с двумя входами и тремя выходами (рис. 2.14). Заметим, что система имеет шестой порядок. Следуя методу нормальных координат, принимаем в качестве переменных состояния * . Xi = Zi, Х2= Xi = Zii Хз = Za; Хд = z; х г; Хд = х- z. Основываясь на приведенной схеме, получим х = Ах-\-Ви; у = Сх. где
 О 10 о о о о
Рис. 2.14. Структурная схема, рассматриваемая в примере 2.7 - О О О -\ о о о о о о о 1 о -К 1 0 0 1 0 0 о о о о о 0 0 1 0 10 * См. 1206] стр. 357 и [ИЗ] стр. 190. 2.9. ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЬНИЕ ДЛЯ СТАЦИОНАРНЫХ СИСТЕМ Хорошо известно, что для стационарных систем вида (2.14) уравнение L (К) = О, (2.46) где К - комплексная переменная - является характеристическим уравнением системы, а корни уравнения (2.46) - полюсы системы. Если система (2.14) описывается уравнением состояния х==Ах + Ви, (2.47) то можно показать (упражнение для самостоятельного выполнения), что характеристическое уравнение можно записать в следующей детерминантной форме *: . Л-Х/ = 0. (2.48) Следовательно, Ь{К)\А - и\. Корни уравнения (2.48) [и, следовательно, полюсы системы (2.34)] известны в матричном исчислении как собственные значения или как характеристические числа матрицы А. Уравнение (2.48) получается при нахождении такого вектора V ц пространстве состояний, который преобразуется матрицей А с точностью до постоянного множителя сам в себя. Другими словами, Av = Kv, (2.49) где X, как и в случае уравнения (2.48),- скалярная комплексная величина. Векторы, удовлетворяющие уравнению (2.49), называются собственными векторами матрицы А. Более полное рассмотрение основ матричного исчисления приводится в приложении I. 2.10. КРАТКОЕ СОДЕРЖАНИЕ Почти все системы, описываемые дифференциальными уравнениями, можно характеризовать векторными уравнениями (2.5): x=f{x,u,ty, y = g(x,u,t). В частности, линейные системы описываются следующими матричными уравнениями (2.8): x = A(t)x + B{t)u; y = C{t)x + D{f)u. Уравнения (2.5) и (2.8) известны как уравнения состояния системы. Вид этих уравнений, вообще говоря, не однозначен. Выбор той или иной формы их записи зависит от исследуемой задачи. Различные способы, выбора переменных состояния рассмотрены в §§-2.5 и 2.6. * Это справедливо лишь, когда в функции G (р) не происходит сокращения нуля с полюсом. Сокращение нуля и полюса можно рассматривать как случайное обстоятельство, когда система п-го порядка ведет себя для стороннего наблюдателя при нулевых начальных условиях, как система (и - 1)-го порядка. Когда это имеет место, вычет сократившегося полюса равен нулю, так что каноническая схема передачи сигналов должна иметь одну прямую цепь разомкнутой. Если данную ветвь не учитывать, то получим матрицу А порядка (и - 1) X (и - 1). Случай сокращения полюса и нуля рассмотрим в следующей главе при введении понятия управляемости системы. в случае линейных систем с постоянными параметрами особое значение имеют следующие два способа: 1) нормальная форма, когда элементами вектора состояния являются выходной сигнал и его первые п - 1 производные; 2) каноническая форма, когда координаты х представляют составляющие собственных колебаний. В случае линейных систем с переменными параметрами нормальная форма представления возможна, а каноническая невозможна. Если имеется динамика, соответствующая числителю [т. е. полином М (р, t) в выражении (2.12) или полином М (р) в выражении (.2.14) не сводятся к постоянным величинам], получение нормальной формы представления усложняется. В этом случае необходимо вводить переменную х i, являющуюся некоторой линейной комбинацией выходного и входного сигналов. В качестве переменных состояния используют величину Xi и ее ft - 1 производные (см. пример 2.6 в § 2.7). При анализе систем с несколькими входами и выходами их также целесообразно описать через переменные состояния. 2.11. ЗАДАЧИ ДЛЯ УПРАЖНЕНИЙ 2.1. Получите уравнение состояния для цепи с бесконечной полосой пропускания, описываемой передаточной функцией F(p) U(p) 1+Tip в которое не входили бы производные от и. Представьте результаты в виде схемы передачи сигналов от и к у. 2.2. Для системы, рассмотренной в примере 2.3, получите уравнения состояния в нормальной форме и найдите матрицу, преобразующую канонический вектор состояния лга) в нормальный вектор состояния {ух> Уй- 2.3. Покажите, что для линейной системы с передаточной функцией oip)--.- уравнения состояния в нормальной форме имеют вид Xn-l х -G -а 1 -йп-г - 2 - fli - К - где выходной сигнал определяется выражением у = х-- kgU, а постоянные ki - выражениями k = b ; i-l ki = 6,- - £ ( = 1..... ) 2.4. Рассмсугрите линейную стационарную систему с одним входом и {t) и одним выходом у (t), связь между входом и выходом которой определяется соотношениями (р+1)(р + 4) .y{t)=G(p)u{t); G{p) = - (р-Ь)Чр + 2Г
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |