

|
|
|
Главная страница Системы автоматического управления Если = а sin (со/ + Ф), а Xia = Р sin (со/ -j- Фа), то -2 а -2 р 11 = ; 12 = -; 1112=cos (Ф1-Ф2); (6.47) к тому же Xiif= J I/ (а sin (со/ + Ф), р sin (со/ + Ф) ] sin (со/ + Ф) d (со/); (6.48а) о W=2 f [Ис51п(сй/ + Ф1), Р51п(сй/+Фа)]81п(сй/+Ф2)а(сйО.. (6.4 о Подставляя выражения (6.47) и (6.48) в соотношения (6.46а, б), можно определить эквивалентные передаточные функции Л/ц и Л/, а- 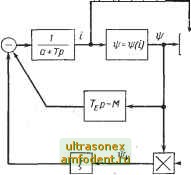 b*TjP Рис. 6.13. Структурная схема системы: сериесный электродвигатель с генератором (для примера 6.8) Мы уже рассмотрели пример нелинейности с двумя входными сигналами, входящей в уравнение Ван-дер-Поля (см. § 6.1), которое описывает систему с обратной связью с нелинейным членом, задаваемым соотношением / (Xj, Х2) = [1X2X2; Xj = Х2. Таким образом, справедливо соотношение (laap f (%i> Ч2) = - sin (со/ + Фа) -Ь -j- sin (со/ + 2Ф1 - Фа) - -i- sin (Зсо/ + + Ф) где без ограничения общности можно положить Ф = 0; тогда получим Xiif =--g- (хаР cos Фа; Х=-(1+1созФа). (6.49) Поскольку Ха = х, то Фа = -g-. Учитывая это и подставляя соотношения (6.47) и (6.49) в выражение (6.46), получим = О иЛ/г = - что согласуется с результатами § 6.1 при а = Xj. Пример 6. 8. Рассмотрим периодические движения в системе с последовательным соединением электродвигателями генератора, которая использовалась как в примере 4.5, так и в примере 5.8. Уравнениям системы в нормальной форме (5.32) соответствует структурная схема, приведенная на рис. 6.13, откуда видно, что в системе есть три нелинейности. предположим что высшие гармоники, генерируемые нелинейностями, будут в значительной степени ослабляться линейными элементами системы; так что можно считать сигналы t и V равными i= to -Ь t sin at; о = vo+ V sin (cot + Ф). (6.50) Для получения соотношения между входом и выходом нелинейностей (() и ill) (i) определим коэффициенты передачи Л/ц (io, i); N21 (io, i); Лао (о, i) и N20 {h, i) такие, что ф (t) = ijjo -Ь ij sin mi +.. -= Лю (io, t) io + Nl (to, i) i sin>/ + Hp (i) i = N20 (io, i) io + N21 (io, 7) t sin tt><-J----. (6.51) (6.52) 10 0,5
10 i 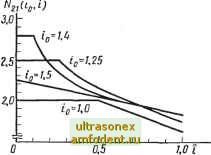 Рис. 6.14. Зависимости Af (io, i) и N2X (to, 0 от i (для примера 6.8) Третья нелинейность это произведение г]) . На основании выражений (6.50) и (6.51) получим я]) (i) 0 = (яро + sincoO ( о + V sin (со + Ф) -f - = = ipofo + cos Ф -f fояр sin at + i])oo sin (co -j- Ф) + + = Nioiovo + -g- Nxxiv cos Ф + voNxii sin co< + iVioiof sin (m -b Ф) -b ... (6.53) Эквивалентные передаточные функции для переменной составляющей Ni (io. t) и Л21 (to, i) можно найти из идеализированной кривой намагничивания (см. рис. 4.20). Это даст нам следующие зависимости: sin 2а а Л/ц (to, i) = l+- l(fo. О = io (I +Л/11) +-acosa --- sin а + sin За , nax - ltol arccos , фтах - i io i t ; (6.54a) (6.546) (6.55) фгаах - i io i > i Кривые Nix иЛ/ai в функции i для различных io показаны на рис. 6.14, а, б: Удобно изучать постоянную и переменную составляющие раздельно *, чтобы выяснить их влияние на установившееся движение в системе. С этой целью структурную схему рис. 6.13 нужно преобразовать в соответствии с выражениями (6.51) и (6.53) к виду, показанному на рис. 6.15, а и 6.15, б. Для ( = О постоянная составляющая определяется из соотношения (5.35). Рассмотрим лишь случай \idc\= Mo Кimax, тогда получим jN (ijHvcos0 idc = dc = io =-±Уу; (го, 0) = 1; 20 (io, 0) = io; Vdc = oo = -- (M - a). -Л IV л7 - %
(6.56) vsin(a}t+0) M-io-TcPJ a) 6) Рис. 6.15, Структурные схемы систем управления примера 6.8: с - по постоянной составляющей; б - по переменной составляющей В присутствии автоколебаний значение постоянной составляющей будет медленно изменяться (рис. 6.15, а), чтобы вновь обеспечить равновесие в системе. Такое смещение постоянной составляющей вызовет изменение эквивалентной передаточной функции по переменной составляющей. В рассматриваемом случае для обычно встречающихся численных значений влияние постоянного смещения на амплитуду и частоту автоколебаний несущественно, и им можно пренебречь. В следующем разделе мы рассмотрим случаи, когда необходимо учитывать одновременно переменную и постоянную составляющие. Исходя из сказанного, можно предположить, что соотношение (6.56) будет справедливо и при i ф 0. При этом, учитывая лишь первые гармоники в уравнениях (6.51)-(6.53) и используя соотношения (6.56), получим a(l-Nii)+ {т+ NiiTe)p Но i sin а)/ f sin (сог-ЬФ)
. .(6.57) Уравнение (6.57) получено в предположении о существовании гармонических колебаний. Для того чтобы убедиться в справедливости этого предположения, необходимо показать, что характеристическое уравнение для (6.57) имеет чисто мнимые корни. Запишем характеристическое уравнение в следующем виде: Tj {Т + NiiTe) +[Ь(Т+ Ni-J-e) + а (1 - Я ) Гу] Я + -Ь afc (1 - iVn) + & оЛа1 = 0. (6.58) * Здесь г1ринято обозначать idc - постоянная составляющая тока {Прим. ред.). ** Заметим, что при i О и р -г- О уравнение (6.57) совпадает с (5.37), если заменить i sin со/ на bi и р sin (ш/-Ь Ф) на bv. Предлагаем читателю самостоятельно пояснить этот результат.
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |