

|
|
|
Главная страница Транзисторные схемы Выражение (23-4в) позволяет оценить необходимое значение коэффициента стабилизации, а выражение (23-46) - необходимое значение выходного сопротивления. Если выходное сопротивление нельзя сделать достаточно малым, то из (23-46) легко найти максимально допустимый ток нагрузки. Очевидно, что допустимый ток нагрузки и желательное выходное сопротивление находятся в обратной зависимости друг от друга. Стабилизаторы напряжения делятся на два основных класса: параллельного типа (параллельные) и последовательного типа (последовательные). Скелетные схемы того и другого типов показаны на рис. 23-2. 23-2. СТАБИЛИЗАТОРЫ ПАРАЛЛЕЛЬНОГО ТИПА Общие свойства. Если пренебречь током через Ri (внутреннее сопротивление регулирующего элемента) *, то на основании рис. 23-2,01 легко записать: /у + /р+/ = -. . (23-5а) откуда Д/у-ЬА/р-ЬА/,= ~\ (23-56) Для энергетических расчетов, не связанных сдифферен-циальными параметрами, можно положить - const; А t/g = О, т. е. считать стабилизатор идеальным. Кроме того, пренебрежем для простоты током /у, поскольку в реальных стабилизаторах /у/р (в случае необходимости можно в дальнейших формулах понимать под /р сумму /р -Ь /у). Тогда из выражений (23-5) следует, что ток регулирующего элемента зависит от двух величин - тока нагрузки и входного напряжения. А именно, если Ui = const, то изменение тока / сопровождается таким же, но противоположным по знаку изменением тока 1, иначе говоря, токи / и /р меняются во взаимно противоположных направлениях: А/р=-А/,. (23-6а) Если же, наоборот, / = const, то изменение тока /р прямо пропорционально приращению входного напряжения: А/р = . (23-66) Выражения (23-6) приводят к выводу, что ток регулирующего элемента минимален при максимальном токе нагрузки и минималь- * Этот ток, как правило, несуществен. При необходимости можно считать сопротивление Ri подключенным параллельно сопротивлению i? в виде неизменной нагрузки. ном входном напряжении. Обозначим через /р.йин минимально допустимый ток регулирующего элемента Тогда с учетом сказанного номинальный ток будет связан с номинальным входньш напряжением следующим образом: г / I Vl ном - Vl мии i 1 Hl/iHOM /оо 7 р. ном - р. мин Т - р. мин Т ) Если сопротивление Ro мало, ток /р. ом может намного превышать ток /р. . Из тех же выражений (23-6) ясно, что максимальный ток (по которому подбирают регулирующий элемент) имеет место при холостом ходе стабилизатора и максимальном входном напряжении. Прибавляя к току /р.мин приращения (23-6), получаем: р. макс - р. мин -\--и. макс = h миН Ч 1- (23-8) Здесь /i H = р. мии + /н.макс -мшимольный входной ток - величина, характерная для параллельных стабилизаторов, которая будет часто встречаться ниже. Напряжение на регулирующем элементе в простейшем случае (рис. 23-2,с) равно выходному напряжению; следовательно, значение t/a ограничено допустимым напряжением регулирующего элемента: У.У,.,оп. (23-9) Иногда последовательно с регулирующим элементом включают гасящее сопротивление R, назначение которого рассматривается ниже. В этом случае Vp~ - /pR < fz- Однако наличие гасящего сопротивления не позволяет избежать ограничения (23-9), так как при случайных перегрузках, когда ток /р уменьшается, напряжение Up растет и регулирующий транзистор может пробиться. Необходимое значение номинального входного напряжения легко найти из формулы (23-За), если подставить t/i H-== + + iMHHo- Тогда yi.o.-lZ(y2 + hu.uRo). (23-10) Коэффициент полезного действия стабилизатора найдем из определения (23-2), используя полученное значение Uiaon и номинальный входной ток /i o = / .макс + р.ном- Тогда С учстом (23-7) у, (1 - н l) /.j/h. макс /по 1 1 J (U2+ flмино) (/lмии-f бнibyRo) Легко убедиться, что знаменатель (23-11) имеет минимум, а к. п. д. - максимум при некотором оптимальном зна- Очевидно, что регулирующий элемент (транзистор) не может работать при сколь угодных малых токах из-за уменьшения коэффициента усиления, роста выходного сопротивления и т. п. Ток /р. ин выбирается из условий сохранения приемлемых параметров регулирующего элемента. чении Ro 1 мин (23-12) Оптимальному сопротивлению (которое чаще всего принимают в сколько-нибудь мощных стабилизаторах) соответствуют максимальный к. п. д. К1-Кет (23-13) и номинальные параметры в оптимальном режиме 1ном=. (23-14) в1=0,05 Ip.Hon - р.мин (23-15) Функции допуска 8 i, необходимые для расчетов, показаны на рис. 23-3. Может показаться, что уменьшение допуска бщ выгодно с точки зрения к. п. д. и других параметров. На самом деле это не так: с уменьшением б , уменьшается опт и соответственно возрастает ток /р. макс- Это, как показано ниже, заставляет выбирать регулирующий элемент с большим запасом по току и мощности. При обычных значениях 6 i = 0,1-;-0,2 получаются довольно низкие значения к. п. д. Пмакс==0,50,3. При токах / </ . макс оптимальный режим нарушается и к. п. д. становится еще меньше. 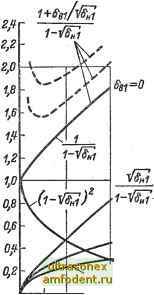 0.1 0,2 . / Рис. 23-3. Функции допусков б, используемые в расчетных формулах. Выбор регулирующего элемента для стабилизатора основывается прежде всего на том, чтобы его допустимый ток превышал /р. макс- Подставляя (23-10) в (23-8) и полагая /р. доп р.макс, получаем: l-bBj , I 6i и,. р. доп -- 1 мин 4 (23-16а) 1-е 1 1-ен, Ro при оптимальном режиме, используя (23-12), получаем: (23-166) р. доп : Функции допусков и бн1, необходимые для расчетов, показаны на рис. 23-3 пунктиром. С увеличением допустимый ток согласно (23-16а) уменьшается; при Rq -уоо . он на 30-35% меньше, чем в оптимальном режиме. Значения R < Rq опт не следует применять на практике, так как они, не давая никаких преимуществ, уменьшают коэффициент стабилизации (см. ниже).
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |