

|
|
|
Главная страница Векторные методы процессов при начальном условии х = х определяется формулой Коши X (О = X (t, to) + J X (t, т) [В (т) U (т) + С (т) f (т)] 4т. о Эта формула позволяет определить решение неоднородного уравнения (2.113), если известна какая-либо система из п линейно независимых решений однородного уравнения (2.114). § 2.10. САР напряжения генератора постоянного тока. Математическое описание Рассмотрим в качестве примера вывод дифференциальных уравнений и передаточных функций системы автоматического регулирования (САР) напряжения генератора постоянного тока, блок-схема которой приведена на рис. 2.29. Она состоит из электронного усилителя у, двигателя постоянного тока с независимым возбуждением Д, являющегося исполнительным элементом, генератора г (объекта регулирования) и делителя напряжения ДН, выходное напряжение Ыд которого в сравнивающем устройстве вычитается из заданного Uq. Определим сначала дифференциальные уравнения и передаточные функции отдельных элементов, входящих в рассматриваемую систему. Начнем с объекта регулирования. Генератор. Управление генератора производится путем изменения переменного сопротивления включенного в цепь возбуждения (рис. 2.30, а). Обозначив через его номинальное значение, т. е. значение R, при котором ток в цепи возбуждения принимает номинальное значение г.ц, можно записать Rn = Rn.n + AR. Отклонение AR переменного сопротивления пропорционально углу ф поворота вала двигателя: А/? = -С1ф. (2.115) Здесь Ci - положительная постоянная, знак минус указьша-ет, что при повороте вала двигателя в положительном направлении сопротивление R уменьшается, в отрицательном - увеличивается. Таким образом, входной (управляющей) величиной генератора является угол ф, а выходной - падение Рис. 2.29 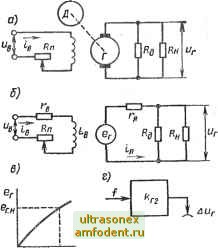 напряжения Ur на нагрузке. Составим уравнение динамики генератора без учета влияния гистерезиса, вихревых токов и т. п. На рис. 2.30, б приведена эквивалентная электрическая схема генератора. На ней и Ljj - активное и индуктивное сопротивления обмотки возбуждения, вр - э. д. с. генератора, г - активное сопротивление обмотки якоря (его индуктивным сопротивлением пренебрегаем), - сопротивление нагрузки (нагрузка предполагается активной). Э. д. с. генератора связана с током возбуждения нелинейной зависимостью er=F{h), (2.116) Рис. 2.30 примерный график которой приведен на рис. 2.30, в. Дополнительное сопротивление /?д выбирается таким, что током через него по сравнению с током нагрузки можно пренебречь. С учетом сказанного можно записать: для цепи возбуждения в = ( в + п.н + Щ >в + Lb dijdt; (2.117) для якорной цепи (2.118) В статическом режиме при номинальных значениях токов возбуждений ig.h и якоря эти уравнения принимают вид в. =( + /?п.н)1в. ; (2.119) ег.н=(я + н.н)1н.н; г.нн.ня.к- (2.120) Произведем линеаризацию в рабочей точке, соответствующей номинальным значениям токов возбуждения и якоря. Подставим в (2.И7) Гб = 1в.н + Д1в и выражение (2.U5). Отбрасывая малый член CiAifp более высокого порядка, чем Дв и ф, и учитывая (2.119), получим или в символической форме (Г,р-Ы) At = Й1ф, (2.121) = LJir + . ); fti = сх i.j{r -f /? . ). Произведя линеаризацию (2.116), получим ег=ег.н + С2А1 в, (2.122) б = в.н Используя это выражение для и уравнение статики (2.120), уравнения (2.118) можно преобразовать к виду cz Aib = ( + 1 ) А , - Д? / . (2.123) Исключив из (2.121) и (2.123) Aib, окончательно получим одно уравнение, связывающее входную (управляющую) ф и выходную Аыг величины и возмущение f = ArJ генератора; (ГвР H)A p=ft,lФ-ft.-a{r,p-f 1)Л (2.124) В изображениях Лапласа это уравнение принимает вид (Г, s+l)U, (s) = Art Ф is) + iT, s + l)F is), где (/r is) = L(A r}; Ф (s) = L (ф); F (s) = L {/}. К генератору приложены два внешних воздействия (ф и /), и он описывается двумя передаточными функциями: передаточной функцией по управляющему воздействию и передаточной функцией Wf по возмущению. Для них имеем: в операторной форме ip) = krx/iTp +1); Wfip) = k.
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |