

|
|
|
Главная страница Векторные методы процессов Пример 2.1. Проиллюстрируем изложенное на примере звена, описываемого уравнением (2.1). Пусть заданному режиму соответствуют и = Н.; н = н*; / = /*; у=у*\ у = у*\ У=У*. (2.3) Обозначим отклонения реальных значений и, f к у от требуемых через Аи, Д/ и Ау, т. е. Аи = и - и*, Д/ = / - /*, Ау ~ у - у*. Тогда и = и* + Аи; и ==и* + Аи; f = f* -\- Af; у = у* -\- Ay; у = = у* -\- Ау; у = у* + Ау. Подставим эти выражения в (2.1) и, рассматривая F как функцию от независимых переменных и, и, у, у и у, разложим ее в ряд Тейлора в точке (2.3) и отбросим малые члены более высокого порядка, чем отклонения. Тогда (2.1) примет вид F* + (дР/ду)* Ау+ {дР/др* Ау+(дР/ду)* Ау+ (дР/ди)* Аи + -\-(дР/ди)* Au+f*-\-Af = 0. (2.4) Здесь звездочка сверху обозначает, что соответствующие функции и производные вычисляются при значениях аргумента, определяемых соотношениями (2.3). Когда в системе устанавливается заданный режим, уравнение (2.1) принимает вид f * + /* = 0. Вычтя это урав-ние из (2.4), получим искомое уравнение звена в отклонениях: aoAy + Oi Ау-\-а2 Ау-Ь Аи - Ь Аи-Са А/ = 0, (2.5) тле ао={дР/дуГ; а=={дР/ду)*; а=={дР/ду)*; Ьо=- {дР 1ди)*; bi=- {дР/ди)*; Со = - 1. Если время / явно не входит в исходное уравнение (2.1) и, кроме того, заданный режим является статическим - величины у*, и* и /* не зависят от времени, то коэффициенты линеаризованного уравнения (2.5) являются постоянными. Звенья и системы, которые описываются линейными уравнениями, называют соответственно линейными звеньями и линейными системами. Уравнение (2.5) было получено при следующих предположениях: 1) отклонения выходной Ау и.входной Аи величин достаточно малы; 2) функция F обладает непрерывными частными производными по всем своим аргументам в окрестности точек, соответствующих заданному режиму. Если хотя бы одно из этих условий не выполняется, то линеаризацию производить нельзя. По поводу первого условия необходимо отметить следующее: нельзя раз и навсегда установить, какие отклонения считать малыми. Это зависит от вида нелинейности. Часто нелинейную зависимость между отдельными переменными, входящими в уравнение звена, задают в виде кривой. В этих случаях линеаризацию можно произвести графически. Геометрически линеаризация нелинейной зависимости между двумя переменными (рис. 2.2) означает замену исходной кривой А В отрезком ее касательной АВ в точке О, соответствующей заданному режиму, и параллельный перенос начала координат в эту точку. В зависимости от того, входит или нет время явно в уравнение, системы разделяют на стационарные и нестационарные. Автоматические системы управления стационарными, если они при постояннвгх 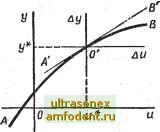 Рис. 2.2 (звенья) называют внешних воздействиях описываются уравнениями, не зависящими явно от времени. Это означает, что свойства системы со временем не изменяются. В противном случае система называется нестационарной. Для линейных систем можно дать также следующее определение: стационарными линейными системами (звеньями) называют системы (звенья), которые описываются линейными уравнениями с постоянными коэффициентами; нестационарными линейными системами (звеньями) или системами с переменными параметрами - системы (звейья), которые описываются линейными уравнениями с переменными коэффициентами. § 2.2. Основные свойства преобразования Лапласа В этом параграфе даны основные сведения о преобразовании Лапласа, которые будут использованы при рассмотрении систем, описываемых линейными дифференциальными уравнениями. Преобразованием Лапласа называют соотношение X(s)= х(Ое- Л. ставящее функции х (f) вещественного переменного в соответствие функцию X (s) комплексного переменного s{s = а-{-+/©). При этом X (t) называют оригиналом а X (s) - изобра- жентм или изображением по Лапласу. То, что х Ц) имеет своим изображением X (s) или оригиналом X (s) является х (), записывается так: x(t)X is) или Х (s) == X (t). Иногда также пользуются символической записью X (S) = L {X (t)}, где L - оператор Лапласа. Предполагается, что функция х (t), которая подвергается преобразованию Лапласа, обладает следующими свойствами: X (t) определена и кусочно-дифференцируема на всей положительной числовой полуоси [о, оо]; х (f) =0 при / <; 0; существуют такие положительные числа Мне, что д; () Же* при О <; с . Функции, обладающие указанными тремя свойствами, часто называют функциями-оригиналами. Соотношение 2щ J Со-/оо X{s)etds, определяющее по известному изображению его оригинал (в точках непрерывности последнего), называют обратным преобразованием Лапласа. В нем интеграл берется вдоль любой прямой Res == Oq > с. Символически обратное преобразование Лапласа можно записать так: x{t)L- {X{s)}, где символ - обратный оператор Лапласа. Остановимся на основных свойствах преобразования Лапласа. 1. Свойство линейности. Для любых постоянных аир L {ах (t) + (t)} = aL {х, (t)} + pZ. {х (t)}. 2. Дифференцирование оригинала. Если производная х (t) является функцией-оригиналом, т. е. обладает указанными выше тремя свойствами, то L {х (t)} = sX (s) -х (0), где X(s) = L {х (t)}, х{0) = lim х (t). Если п-я производная х (t} является функцией-оригиналом, то L л;(0}=8 Л(8)-8 -л;(0)-s -zx(0)-X (0), (ft) (ft) где х{0) =limx (/), k = 0,l,...,n - l. t-*-i-o
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |