

|
|
|
Главная страница Схемы квантования Механическая система Iсистема аналогий Электрическая модель Жсистема аналогии 7 е Z о-СП о-ЬтЛ-о о--1--о о-(ет)-о о---о  3 -о 7. -о Схемы замещения элементов упругой системы при растяжении, составленные по методу электромеханических аналогий Из четырехполюсников, замещающих отдельные элементы, составляется электрическая модель динамической системы в целом. На рис. 6-2 приведен пример применения метода четырехполюсников к одномерной механической системе. Модели многомерных систем составляются из многополюсников. Для задачи изгиба стержневых систем путь построения моделей заключается в том, что стержневая система моделируется по стержням - участкам системы. Каждый стержень замещается электрической схемой - восьмиполюсником, воспроизводящим связи между динамическими перемещениями, углами поворота, изгибающими моментами и перерезывающими силами на его концах. Участки стержневой системы соединяются между собой в соответствии с условиями сопряжения и граничными условиями. Выше было показано, что для продольных и крутильных перемещений уравнения, связывающие значения сил и перемещений на концах каждого участка одномерной системы, выражаются так же, как и для электрических четырехполюсников. Задачи изгиба значительно сложнее, так как здесь необходимо для каждого участка воспроизвести в схеме замещения связи между восемью величинами. Если представить участок стержневой системы в электрической модели в виде эквивалентного восьмиполюсника, то последний будет иметь четыре пары полюсов, на которых моделируются следующие механические величины: f-W-1 -о-VW- /77, о--*-о-cvv-i-о- Рис. 6-2. Механическая система и ее электрическая модель из пассивных четырехполюсников. 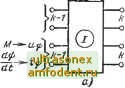 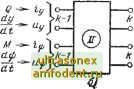 Рис. 6-3. Восьмиполюсники - модели участка стержневой системы по первой (/) и второй ( ) системам аналогий. 1) изгибающий момент Mh-i и угловое перемещение -фл-ь (угловая скорость ijjft-i) начала рассматриваемого участка; 2) перерезывающая сила Qh-i и прогиб yn-i (линейная скорость i/ft-i) начала рассматриваемого участка; 3) изгибающий момент и угловое перемещение фй (угловая. скорость ipfe) конца рассматриваемого участка; 4) перерезывающая сила Qh и прогиб уь (линейная скорость. yh) конца рассматриваемого участка. По первой системе аналогий обобщенным силам на концах участка соответствуют напряжения, а обобщенным скоростям - ток (рис. 6-3,а), по второй системе аналогий обобщенным силам соответствуют токи, а скоростям--напряжения (рис. 6-3,6).  £3
L F=4 f Рис. 6-4. Модель неразрезных балок с различными видами опор. Общий метод построения электрических моделей для задач изгиба стержневых систем состоит в соединении восьмиполюсников, представляющих отдельные ее стержни, в соответствии с граничными условиями и условиями сопряжения. Граничные условия в моделях изгиба осуществляются так же, как и в моделях продольных и крутильных колебаний: жесткому закреплению по какой-либо координате в электрической модели по первой системе аналогий соответствуют разомкнутые полюсы, а по второй - полюсы, замкнутые-накоротко. Из рис. 6-4 видны особенности электрического моделирования! неразрезных балок с различными видами опор. Для упрощения чертежа здесь миогополюсиики упругих участков изображены в виде прямоугольников. Внутренние их схемы на> операционных усилителях рассматриваются далее. 6-2. модели прямой аналогии на операционных элементах Желание сохранить преимущества физической наглядности метода прямой аналогии и вместе с тем ие прибегать к созданию специализированных установок, а использовать АВМ общего назначения, приводит к реализации моделей прямой аналогии на опера-
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |