

|
|
|
Главная страница Схемы квантования Сомножители, подаваемые на логические ячейки Л\ и Л2, должны быть одного знака: Л1=тах(л:ь Хг); 2=min(xi, лгг). Наихудший случай имеет место, когда Xi=X2 (момент перекоммутации). Особенно удобна схема, когда произведение примерно постоянно (либо известно, что максимум произведения много меньше 100 В). 5-3-5. Схема переключения крутых участков двух функций одной переменной. f (y.\\ - fx) при х<х,\ ,{х) при Х>Х, tM = U{Xr)-
Для этого может быть применена схема получения максимальной из двух функций 4-3-1, но без инвертора. Применение такой схемы является методическим приемом при необходимости отработки на модели функцио- с разрывом первой произ- нальной зависимости [/з(л:) водной в экстремуме На блоке нелинейности такую функцию получить трудно, поэтому настраивают две функции Ц\х) и hi)\ и применяют схему 4-3-1 со смещением (-Е). 5-4. схемы испытаний и настройки блоков авм 5-4-1. Схема для ускоренного определения дрейфа нуля усилителя. -J>-t>n  На выходе интегрирующего усилителя с постоянной времени RC, замкнутого положительной обратной связью через усилитель перемены знака (схема с), спустя время т образуется напряжение, равное Е. При этом из эквивалентной схемы б следует: Ц -gp pd(eo-Ё). р. -R---dl -- i=RC где ео - дрейф усилителя, приведенный ко входу. При т=0 имеем: Дрейф о, приведенный ко входу, можно рассчитать в зависимости от значения xjRC по формуле Е Е Например, при Е- :25 В; т=13 с; jRC=1 имеем: 25 - = PV-60mkB. Оценка моделируемого процесса л:=/(т) с точки зрения дрейфа интегрирующего усилителя за время решения Тмакс (см. в) Аи макс Рациональный выбор масштабов переменных требует, чтобы D/- 1 макс где п - число циклов колебаний за время решения. Ожидаемый дрейф усилителя составит Дыдр=2япео. 5-4-2. Схема для компенсационного метода проверки коэффициента передачи интегрирующего усилителя и временных параметров управляющих реле. 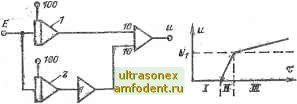 Значение Ui пропорционально разности во времени срабатывания управляющих реле. На участке / зависимости и{х) усилители / и 2 в исходном состоянии: на участке - усилитель 1 в режиме Решение , а усилитель 2 в исходном состоянии (или наоборот); на участке III - оба усилителя в режиме Решение . Негоризонтальность характеристики и{х) на участке / характеризует различие коэффициентов передач интегрирующих усилителей. 5-4-3, Схема для оценки динамическвй погрешности с помощью электронного маятника.  X (-с) = x e~cos (ВТ, где (o=l/i?C; б - фазовая погрешность, учитывающая полную погрешность интегрирующего усилителя (вследствие конечности коэффициента усиления, утечки конденсатора, входных и выходных сопротивлений усилителя), а также долевую (половинную) погрешность вспомогательных блоков - усилителя перемены знака и делителя напряжения (если имеется). За время т где а - изменение радиуса фигуры Лиссажу за п= =т/7=сйт/2я циклов колебаний; Т - период колебании маятника. 5-4-4. Схема для оценки динамической погрешности-блока нелинейности. 
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |