

|
|
|
Главная страница Схемы квантования части появляются большие коэффициенты, которые трудно задать на АВМ: Поэтому Fi{-) формируется на входе операционного? усилителя с разомкнутой цепью обратной связи, который служит для отслеживания старшей производной (схема а). Для исключения самовозбуждения возмож* но включение в цепь обратной связи конденсатора не большой емкости. Второй способ. Для формирования правой части используется предварительное преобразование уравнение (схема б). В уравнении прибавляют и отнимают л;( >, а затеье разрешают уравнение относительно д; ); д(п)=(1 а )х( )+Л(л;( -), X, х). Используя суммирующий усилитель с дополнитель- ной положительной обратной связью с коэффициентоле в~1, решают уравнение в неявном виде. Схема требует мер по обеспечению устойчивости. Третий способ. Уравнение разрешается относительноа инерционного звена (схема в): = f - X + / (.)1. Т. е. (Гр+1)х( - = Р2(д;( -2), ...,х, x)=-Fii ). Емкость конденсатора С в цепи обратной связи уси* лителя выбирается в соответствии с значением а /е ь и масштабом времени. 5-1-4. Схема четырехквадрантного устройства деления, обеспечивающая воспроизведение функции z-xjyi путем минимизации функции F - ~-{yz - xf. При постоянном значении у напряжение z следит за входным сигналом х с некоторым запаздыванием-.. Постоянная времени цепи запаздывания, обратно пропорциональная коэффициенту усиления k-ljn&i, в пе ле обратной связи обычно весьма мала. Исходное значение г(0) =л;(0)/(0) должно быть точно задано. UZ-X р0--z(01=  Оперируя с делителем у любой полярности, схема воспроизводит соотношение ky(yz - x). Схема допускает одновременное прохождение через нуль делимого х и делителя у. При минимизации F= = \yz-х\ второе множительное устройство заменяется аналоговым переключателем. Уравнение, решаемое схемой, принимает вид: dz di = - kys\(yz - x). 5-2. интегрирование по невременному аргументу 5-2-1. Схема интегрирования по невременному аргументу- по машинной переменной л;(т). e = Jyrf.+2(0) = J()dx + z(0).  Интегрирование по машинной переменной х(х) возможно в тех случаях, когда в модели имеется напряжение, пропорциональное производной по времени х{х). Погрешность определяется в основном точностью блоков перемножения. 5-2-2. Схема моделирования функции =з1пл;. Схема основана на решении определяющего дифференциального уравнения  с начальными условиями (0)=0; (0) = 1. 5-2-3. Схема моделирования функции Основана на решении вспомогательного уравнения dy!dx-\-by=0, преобразованного к виду  В схеме а,=Ь; 02=1(0)1. 5-2-4. Схема воспроизведения функциональной зависимости у=\пх(х). }1D0siqnllnx(O)] I0osign[lnxfo)] 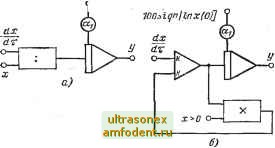 Схема основана на решении вспомогательного определяющего уравнения dy d-z di X Ограничения: л;>Л и незнакопеременный; ai= =\пх{0).
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |