

|
|
|
Главная страница Магинтогидродинамическое измерение температуры 11.1. Методы измерения температуры шумовыми термометрами и структурные схемы термометров Методы измерения температуры шумовыми термометрами можно классифицировать согласно схеме на рис. 11.4 [29, 690]. В методе непосредственной оценки температура определяется из соотношения [29] где и - средний квадрат измеряемого шумового напряжения; Кэ - эффективный коэффициент усиления; - сопротивление чувствительного элемента; - средний квадрат -собственного шумового напряжения 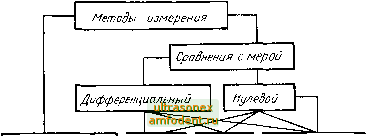 НепосредстЬенной оценки Замеще ния Срабне-ния Протиёопоставле-ния Рис. 11.4. Классификация методов измерения шумовой термометрии [29, 690[ усилителя. Структурная схема термометра непосредственной оценки приведена на рис. 11.1. Термометр предварительно калибруется в одной или нескольких температурных точках, а к его измерительной цепи предъявляются повышенные требования по стабильности параметров. Достоинством термометра является высокое быстродействие. Систематическая погрешность, связанная с температурной зависимостью сопротивления чувствительного элемента, уменьшается схемотехническими способами; использованием двухвходовых аналоговых и цифровых устройств, а также введением отрицательной обратной связи (рис. 11.5) [1056-1058, 1067]. Уменьшить систематическую погрешность термометра от собственных шумов масштабных преобразователей можно многотактным измерением шумового напряжения. При двухтактном способе измерения в первом такте ко входу масштабного преобразователя подключается чувствительный элемент и запоминается суммарное значение средних квадратов шумовых напряжений элемента и преобразователя. Во втором такте элемент замкнут и производится запоминание среднего квадрата шумового напряжения преобразователя. Разностный сигнал запоминающих устройств пропорционален измеряемрй температуре, однако содержит систематическую погрешность, связанную с разницей в постоянных времени входной цепи при различных положениях коммутатора. В трехтактном способе измерения 1067, 1071] (рис. 11.6) применяется интегратор, работающий в двух режимах. В первом такте выходное напряжение интегратора щ = (i/tj) X X ( щ - п) поступает на запоминающее устройство 5, ключи 9, 11-14 4ZHZHIHZJ 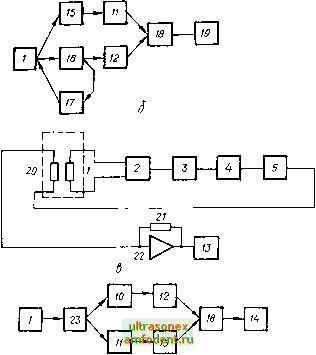 Ргс. 11.5. Структурные схемы шумовых термометров, уменьшающие зависимость результата измерения от сопротивления чувствительного элемента: / - чувствительный элемент; 2 - широкополосный усилитель; 3 - квадратичный детектор; 4 - фильтр; б - устройство компенсации шумов; 6 - делитель-ctZ,- ln f питания; 8 - высокоомиый рези тор; 9 - развязывающий рези-7в 1Л У< ли; 12. 13 - детекторы; 14 - регистрирующий прибор; пепемножаю,п ° ° усилители; /7 - устройство обратной связи; 18-1т11т,Т! У Р°й во; 9 - интегратор; 20 - резистор, идентичный чув-усилиь ?ч Р °Р пи обратной связи; гг операционный усилитель, 23 - частотный детектор разомкнуты, ключ 15 замкнут. Во втором такте ключи , 12, 15 разомкнуты, ключи 9, 13, 14 замкнуты, шум чувствительного элемента усиливается в 2, а выход 5 подключен ко входу интегратора 4. При /х = 4 и Tj = Tj выходное напряжение интегратора щ = (ti/xi) lij, т, е. пропорционально измеряемой температуре. Здесь t - время интегрирования, т - постоянная времени интегратора, - напряжение дрейфа квадратичного детектора. В третьем такте ключи 9, 13, И разомкнуты, ключи И, 12 замкнуты и производится деление результата иа значение сопротивления чувствительного элемента с помощью операционного усилителя 6 с коэффициентом передачи RilRi. Результат на выходе регистратора Н в этом случае пропорционален измеряемой температуре и не зависит от сопротивтения чувствиюльного 7 Ry Рис. 11.6. Структурная схема шумового термометра с уменьшенной погрешностью от собственных шумов масштабного преобразователя [1067, 1071): / - чувствительный элемент; 2 - широкополосный усилитель; 3 - квадратичный детектор; 4 - интегратор; 5 - запоминающее устройство; 6 - операционный усилитель; 7 - резистор обратной связи; 8 - регистратор; 10 - коммутатор: 9. И -15 - ключи элемента. Трехтактный способ измерения уменьшает систематическую погрешность, ио требует большего времени измерения. Можно измерять температуру по мощности шумов Рц, = [97, 1207]. В первом такте усиливается и запоминается напряжение теплового шума чувствительного элемента, во втором ~ напряжение, пропорциональное yuVR, и далее полученные эффективные значения этих напряжений перемножаются. При этом исключается систематическая ошибка, связанная с температурной зависимостью сопротивления. Можно также в первом такте измерять эффективное значение шумового напряжения U, во втором - эффективное значение тока /, далее закоротить вход термометра н измерить (/3 и /,3. Тогда температура определяется из соотношения Г = -1 ((/2 (/2)/[(( /) (U./l,)]. Здесь с - постоянная, определяемая при калибровке. Используя в шумовом термометре метод замещения, можно исключить такие недостатки предыдущего метода, как зависимость результата измерения от коэффициента передачи, а также систематическую ошибку, связанную с собственными шумами масштабного преобразователя (рис, 11.7). В таком термометре попереме1шо подключаются на вход широкополосного усилителя измерительный {R, Сд) и опорный (Rg, Cq) первичные преобра- зователи. К выходу усилителя / подключены НЧ и ВЧ каналы, полосы пропускания которых 10...50 и (465 ± 10) кГц соответственно. Регулируя Rq и Со, следует добиться равенства нулю разностных напряжений на выходах каналов, при котором выполняется условие ЯдГд = RoTg и ЛдСд = = RgCo. Температура определяется из соотношения Тд = TMR, Рис. 11.7. Структурная схема шумового термометра, построенного по методу замещения: / - широкополосный усилитель; 2 - узкополосиый усилитель (466 ± 10 кГц); 3 - усилитель (10...60 кГц); 4, 5 - детекторы; 6, 7 - фильтры; 8, 9 - индикаторы Погрешность нулевого метода замещения определяется погрешностью уравнивания напряжений на выходе термометра, а установление баланса йапряжений требует сравнительно больших затрат времени. Дифференциальный метод замещения в комбинации с нулевым методом замещения позволяет на два порядка уменьшить погрешность термометра h А Рис. 11.8. Оптимизированная структурная схема шумового термометра J689]: / - первичный преобразователь; 2 - опорный преобразователь; 3, 4 - линии связи; 5 - масштабный преобразователь; 6,7 - полосовые фильтры; в, Р - линейные детекторы; 10, 11 - линейные системы совместной обработки сигнала; 12 - регистратор [1283]. В работе [689] проведена оптимизация структурной схемы термометра, функционирующего по методу замещения, что исключило взаимное влияние нч и ВЧ каналов (рис. 11.8), Используя метод сравнения (рис. 11.9), который позволяет за счет введении аттенюатора обеспечить постоянство частотных характеристик г/7~ i 1 лс Xj V 1 I I----i Рис. 11.9. Структурная схема шумового термометра, построенного по методу сравнения [29]: / - усилитель; г - аттенюатор; 3 - прсчежуточный преобразователь; 4 - регистратор Z. 1 Рис 11.10. Структурная схема шумовй1т термометра противопоставления [29]: / шумовой диод; 2 - фазорасщепитель; 3.1, 3.2 - предуснлители; 4 - двух-канальный усилитель; 5 - перемножитель; 6 - интегратор  входных цепей, можно исключить ВЧ канал. Согласно [1569], погрешности методов замещения и сравнения одинаковы. Минимальная погрешность составляет 0,01 % при высоких температурах [29]. В методе противопоставления масштабный и промежуточный преобразователи служат нуль-органом, который регистрирует равенство средних квадратов противопоставляемых шумовых напряжений [29[. Опорное шумовое напряжение на схеме (рис. И. 10) получают от шумового диода, работающего в режиме насыщения, и фазорасщепителя. Чувствительность термометра составила 10~ ВГц при времени усреднения 10 с, погрешность - не более 1 %. Для измерений колебаний температуры пригоден дифференциальный метод противопоставления (рис. 11.11). В этом методе основная часть шумового напряжения чувствительного элемента компенсируется шумовым напряжением опорного первичного преобразователя и определяется значение температуры, а изменение шумового напряжения, связанное с изменением температуры, сравнивается с близким по величине шумом известного сопротивления при комнатной температуре, которое периодически подключается на вход шумового термометра. Колебания температуры рассчитываются по формуле [29[ ДГ = [Д (йдГд) - ARTMR = [Д (йдГд) - Д?дГ2 ?,д, где /?,д, /?2д ~ сопротивления при начальной и конечной температурах, Д?д - изменение сопротивления при колебаниях температуры, Д (RjsTp) - изменение среднего квадрата шумового напряжения. Рис. 11.11. Измерение колебаний температуры шумовым термометром: / - образцы; 2 - источник тока; 3, 4 - усилители; 5 - перемножнтель; 6 - интегратор; 7 - самописец; 8 - шумовой генератор; 9 - фазорасщепитель; 10 - цифровой вольтметр Рис. 11.12. Структурная схема импульсного шумового термометра [29]: / - первичный преобразователь; 2.1,2.2 - двухканальный масштабный преобразователь; 3.1, 3.2 - формирователи импульсов; 4 - схема совпадений; 5 - разностная схема; 6 - ключ; 7 - регистратор Характер измеряемого шумового сигнала позволяет сравнительно легко перейти к использованию цифровых методов обработки, в частности, основывающихся на регистрации числа шумовых импульсов, шкт которых превышает заданное пороговое напряжение [114,
|
||||||||||||||||||||||||||||||||
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |