

|
|
Главная страница Сети мобильной связи и телекоммуникации  VBbiX/ дБ Hvlivv
Рис. 4.2. Переходные процессы в инерционном авторегуляторе уровней ния звука. Для сигналов речи время установления 6... 120 мс, для скрипки 80... 120 мс и т.д. Лишь некоторая небольшая группа источников звука имеет время установления меньше 5 мс. Найти выход из этих противоречивых требований позволяет свойство слуха замечать нелинейные искажения лишь в тех случаях, когда их длительность превышает 10 мс. Исходя из этих соображений, для ограничителей уровня выбирают время срабатывания (установления) таким образом, чтобы не исказить естественное время нарастания звука в помещении, т.е. 0,5...2 мс. Конечно, в течение этого времени будут наблюдаться нелинейные искажения, но слух их не воспринимает. При выборе времени восстановления также сталкиваются с противоречивыми требованиями. Если выбрать время восстановления совсем малым, то ограничитель практически превратится в пикосреза-тель и будет вносить большие нелинейные искажения. Если взять время восстановления равным времени срабатывания, то нелинейные искажения, даже если они и возникнут, не будут заметны на слух. Однако при этом звучание потеряет свою контрастность. Если же выбрать время восстановления очень большим, то возможны длительные ослабления уровня вещательного сигнала. Так, если после сигнала с большим уровнем, вызвавшим уменьшение коэффициента усиления АРУР, будут следовать сигналы с малым уровнем, то последние будут ослаблены. Пока коэффициент усиления АРУР не восстановится, сигналы будут передаваться с пониженным уровнем. Для сохранения естественности звучания выбор времени восстановления связали с реверберационными характеристиками помещений. Исходя 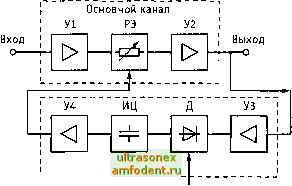 Канал управления <Ь£зад Рис. 4.3. Структурная схема инерционного авторегулятора из этого, в ограничителях максимальных уровней время восстановления выбирают от 0,5 до 2 с. Временные характеристики сжимателей динамического диапазона и шумоподавителей определяются особенностями их работы. Выбирать у них время восстановления как у ограничителей нельзя, так как они должны быстрее восстанавливать коэффициент усиления во избежание маскировки сигнала шумом. Так, для речевых сжимателей выбирают время восстановления 300 мс. У сжимателей музыкальных сигналов предусматривают возможность оперативного выбора времени восстановления 100, 300, 500 мс, 1 и 2 с. В инерционных авторегуляторах управление коэффициентом передачи осуществляется самим сигналом. Структурная схема такого АРУР представлена на рис. 4.3. В данной схеме применена обратная регулировка. Регулируемый элемент (РЭ) выполняет необходимую регулировку коэффициента передачи АРУР в соответствии с требуемым законом регулирования. Входной усилитель (У1) обеспечивает подачу на РЭ сигналов необходимой амплитуды. Выходной усилитель (У2) обеспечивает требуемое выходное напряжение и низкое выходное сопротивление. Интегрирующая цепь (ИЦ) определяет временные параметры АРУР. Детектор (Д) предназначен для выпрямления вещательного сигнала в цепи управления с тем, чтобы осуществить заряд конденсатора ИЦ. Детектор Д и ИЦ преобразуют сигналы звуковой частоты в относительно медленно изменяющееся управляющее напряжение определенной полярности. Усилитель УЗ предназначен для развязки и необходимого усиления сигнала в цепи управления. Усилитель У4 вых, К вых.max вых.ном 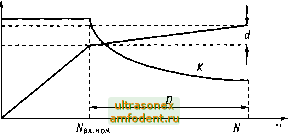 вх.тах /Vbx Рис. 4.4. Амплитудная характеристика ограничителя максимальных уровней обеспечивает согласование с РЭ и требуемую мощность сигнала канала управления. В инерционных ограничителях уровня (ОУ) коэффициент передачи уменьшается с порогового значения таким образом, что при дальнейшем увеличении входного сигнала напряжение на выходе изменялось незначительно (рис. 4.4). Величины D и d называются соответственно диапазоном ограничения и степенью превышения и определяются по амплитудной характеристике ограничителя. Если из схемы рис. 4.3 убрать источник напряжения задержки Езад , обеспечивающего пороговое действие авторегулятора, получим сжиматель, у которого коэффициент передачи К уменьшается, начиная с самых малых входных сигналов (рис. 4.5). Расширитель имеет обратный закон регулирования и его коэффициент передачи /С возрастает с ростом входных сигналов (рис. 4.6). Отношение динамического диапазона сигналов на выходе авторегулятора d к динамическому диапазону на входе D называется коэффициентом сжатия (расширения): у = d/D . Очевидно, что для компрессоров у < 1, а для экспандеров у > 1.   Рис. 4.5. Амплитудная характеристика сжимателя (компрессора) вх N.  Рис. 4.6. Амплитудная характеристика расширителя (экспандера) 4.3. Устройства шумоподавления Устройства шумоподавления предназначены дпя улучшения отношения сигнал-шум на выходе канала звукового вещания или устройства записи - воспроизведения сигнапов и могут быть двух видов: статические и динамические (адаптивные). К статическим относят такие устройства, параметры которых не зависят от входного сигнала и в процессе работы остаются неизменными. Адаптивные шумоподави-тели изменяют свои параметры под воздействием проходящего через них сигнапа. Рассмотрим вначапе статические устройства шумоподавления, действие которых основано на лучшем, чем при их отсутствии, согласовании сигнала с каналом. Самым распространенным способом статического шумоподавления является использование предыскажающих и восстанавливающих контуров. Известно, что спектр звуковых сигналов имеет значительную неравномерность, причем спад особенно заметен в области высоких частот звукового диапазона (рис. 4.7, а). С другой стороны, шум в канале обычно распределен по спектру равномерно (см. рис. 4.7, б). Это позвопяет упучшить отношение сигнал-шум на выходе канала за счет испопьзования предыскажающих 5 2260 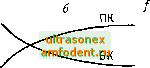 Рис. 4.7. Диаграммы, поясняющие использование предьюкажений дпя снижения уровня шума Канал связи -20 -40--60- 20 дБ Рис. 4.8. Принцип работы компандерной системы (ПК) и восстанавливающих (ВК) контуров. Первые включаются на входе канала, вторые - на его выходе. Коэффициент передачи ПК выбирается так, чтобы обеспечить подъем тех спектральных составляющих сигнала, уровень которых относительно мал. На выходе канала включается ВК с коэффициентом передачи, обратным частотной характеристике ПК (см, рис. 4.7, в). Поэтому на выходе канала спектр сигнала останется неизменным. Шум же, проходя через ВК, будет существенно ослаблен (см. рис. 4.7, г). Наиболее распространенным видом динамического шумоподави-теля является компандерная система, состоящая из компрессора (сжимателя), устанавливаемого на входе канала, и экспандера (расширителя), устанавливаемого на его выходе. Эта система широко применяется в междугородных каналах звукового вещания и в различных модификациях в устройствах магнитной записи. Структурная схема компандерной системы приведена на рис. 4.8. Пусть, например, динамический диапазон сигнала 60 дБ, а уровень шума в канале передачи -40 дБ. Очевидно, что в канале уровень шума на 20 дБ превысит уровень слабых сигналов и они будут скрыты в шумах. Сжиматель, у которого у, =0,5, поднимает слабый сигнал до уровня -30 дБ, что на 10 дБ выше уровня шума, В пункте приема расширитель восстановит исходный динамический диапазон, а уровень шума на выходе расширителя при прохождении слабых сигналов окажется на 20 дБ ниже уровня этих сигналов. Таким образом, применение компандера позволяет передать сигнал вещания по каналу, динамический диапазон которого меньше динамического диапазона самого сигнала. При этом средний выигрыш в отношении сигнал-шум составляет 10 , 13 дБ, Очевидно, что для восстановления неискаженного динамического диапазона расширитель должен иметь Ур = 2, Таким образом, . Ур = 1. Это означает, что сжиматель и расширитель компандерной системы должны обладать взаимно связанными амплитудными характеристиками, что трудно обеспечить, так как компандер работает в широком динамическом диапазоне. Это является одним из недостатков компандерной системы. Недостатком компандера является также возникновение на его выходе эффекта модуляции сигнала шумом. Связано это со следующим. В компандере степень подавления шума определяется уровнем полезного сигнала. Максимальное шумоподавление имеет место при слабых сигналах. При максимальных уровнях сигнала отношение сигнал-шум не меняется. Следовательно, уровень шума на выходе изменяется в такт с сигналом. При совпадении спектров сигнала и шума это обстоятельство не сказывается на восприятии, так как шум маскируется сигналом. Если же спектры не совпадают, то шум не маскируется сигналом. Такой шум обычно называют программно-модулированным. В частности, при передаче низкочастотных сигналов (например, при игре басовых инструментов) высокочастотный шум начинает изменяться по уровню в такт с этим низкочастотным сигналом и поэтому оказывается особенно заметным. Еще один недостаток компандерной системы - появление нелинейных искажений в переходных режимах (при срабатываниях и восстановлениях сжимателя и расширителя), вызванных несовпадением их частотных и фазовых характеристик, а также неоптимальным выбором постоянных времени цепей регулирования. Это объясняется тем, что, с одной стороны, переходный процесс должен быть настолько коротким, чтобы при скачкообразном увеличении уровня входного сигнала не возникало выбросов, приводящих к перегрузке системы. Для выполнения этого требования постоянная времени цепи управления не должна превышать одной четверти периода максимальной частоты сигнала, что при частоте 20 кГц составляет всего 12,5 мкс. С другой стороны, во избежание значительных нелинейных искажений низкочастотных составляющих сигнала скорость изменения коэффициента усиления должна быть достаточно малой и при допустимом коэффициенте нелинейных искажений 0,2 % на частоте 20 Гц не должна быть больше 6 дБ/с. При диапазоне регулирования в 30 дБ это означает, что требуемое время восстановления составляет около 5 с. Отношение времени восстановления к времени срабатывания 400 ООО: 1. Очевидно, что при таком большом отношении выбор постоянных времени должен подчиняться компромиссным соображениям, отличным от оптимальных.
|
||||||||||
|
© 2000 - 2026 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |