

|
|
|
Главная страница Комбинированное использование портов Внешняя схема сброса может потребоваться, если вы используете кварцевый резонатор относительно низкой частоты, с достаточно большим временем разгона . В таком случае применяется схема, приведенная на рис. 1.26. Эта схема известна пользователям и может применяться для микроконтроллеров, выпускаемых не только ком-панией Microchip, но и другими фирмами. Обратите внимание па резистор R1, значение которого может варьироваться от 100 Ом до 1кОм. Он служит для защиты входа MCLR микроконтроллера от положительного напряжения на конденсаторе С при выюпочении питания. 1N914 или 1N4148 Ручной JO сброс \q MCLR WCLR Рис. 1.2 R<40kn Автоматический сброс при включении питания и ручной сброс Наконец, если напряжение питания может снижаться до уровней, способных нарушить нормальную работу микроконтроллера, лучше использовать схему, инициир\тощ)ТО сброс, когда напряжение падает ниже определенного порога. Последние версии PIC-микроконт-роллеров в отличие от ИС подсемейства 16СХХ имеют для этого специальные аппаратные узлы. Две схемы внешнего сброса, предлагаемые фирмой Microchip, представлены на рис. 1.3. Схема со стабилитроном (рис. 1. За), обладающая большей точностью, обеспечивает сброс, как только питание опускается ниже VZ - -0,7 В, в то время как схема без стабилитрона (рис. 1.36)- при снижении напряжения до уровня 0,7 (1 +R2/R1)- Порты ввода/вывода Другие выводы микроконтроллеров 16СХХ выполняют функций портов ввода/вывода, с помощью которых обеспечивается взаимо действие вщпгренних узлов с периферией. Особое внимание следуе обратить на согласование уровней сигналов микроконтроллера л внешних схем. Этой проблеме посвящена глава 3. ЗЗкпП VZ 2? lOkfi зэкпп mclr  Сброс, если Vdd<VZ+0.7 Рис. 1.3 Сброс, если Vdd<0,7(1+R2/R1) Схемы автоматичеаого сброса в случае снижения напряжения питания БАЗОВЫЕ СХЕМЫ Существует множество различных схем подключения Р1С-микро-контроллеров, обеспечивающих их нормальное функционирование. Здесь приведены две базовые, которые используют схемные решения, представленные на рис. 1.1-1.3. На их основе вы сможете самостоятельно построить любые другие. Первая из предлагаемых схем (рис. 1.4) встречается в недорогих переносных приборах. Она использует внутреннюю схему автоматического сброса и типовой RC-генератор. +V о-GND 0-,  Bxogo/6i ьходь Рус1.4 pic 16СХХ ЭконоААИчный вариант подключения PIC-конфоллеров Вторую схему (рис. 1,5) можно рекомендовать, если вопросы 4enbj и размеров не первостепенны. В ней используется кварцевый тактовый генератор, а схему сброса образует RC-цепочка, к которой пц необходимости добавляется кнопка ручного сброса. Возможны и дру. гие варианты в зависимости от предъявляемьгх к устройству требований. Например, если в вашем приложении нужен очень точный отсчет времени, не используйте тактовый RC-генератор. При нестабильном питании микроконтроллера лучше выбрать схему сброса, представленную на рис. 1.3. Это вопрос не техники, а элементарного здравого смысла. +V о 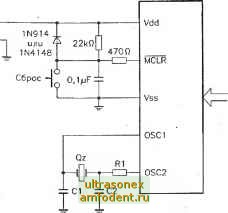 Входа/Ьаходь Рис. 1.5 Рекомендуемая аемс подключения ГЛАВА 2 РАЗРАБОТКА 1 В:этой главе: Выбор микроконтроллера Ьсемблер или языки высокого уровня ИЛОЖЕНИЙ (1К1стема разработки разработка программного обеспечения ДНя промышленного применения Средава разработки фирмы Microchip Синтаксис ассемблера MPALC Ассемблер PASM Средства разрабогки фирмы Parallax Разработка приложений на базе микроконтроллеров мало отли !. ется от создания приложений на основе микропроцессоров вообще При разработке таких приложений одним из главных вопросов является оптимальное разделение функций между аппаратурой и программным обеспечением. В качестве классического примера, который позволяет хорошо понять суть этой проблемы, можно привести устройство управления цифровой индикацией. Практически всегда управление индикацией осуществляется с помощью техники мультиплексирования {дппа-мическая индикация) или через последовательные интерфейсы, что позволяет сократить число линий связи, обеспечивающих управление индикатором. Чтобы упростить взаимодействие микроконтроллера с индикаторными устройствами, можно либо использовать внешние специализированные микросхемы, либо программно реализовать соответствутощие интерфейсы. Очевидно, что в первом случае усложняется аппаратура и упрощается программное обеспечение, так как управлять уплотнением каналов связи будет именно внешняя схема. Во втором случае оборудование, напротив, потребуется самое элементарное, зато программному обеспечению придется уделить гораздо больше внимания, причем программа связи должна обеспечивать необходимую скорость обмена. Таким образом, прежде чем начинать разработку приложения с применением микроконтроллера, важно хорошо продумать варианты решений. Когда выбор сделан, можно переходить к подбору собственно микроконтроллера. ВЫБОР МИКРОКОНТРОЛЛЕРА При выборе микроконтроллера надо исходить из его футшциональ-ных возможностей и внутренней архитектуры (см. табл. 1.1). Выбор зависит от наличия или отсутствия системы обеспечения разработки (программной среды разработки и соответствующего оборудования), а также финансовой базы, которой вы будете располагать - это может быть и масштаб промышленного производства, допускающий значительные затраты, и разработка единичных образцов, требующая мрптимальных средств. Иногда лучше выбрать микроконтроллер, не содержащий всех необходимых элементов, рискнув добавить к нему затем одну или две внешние микросхемы. Нецелесообразно покупать один супер-микроконтроллер , если нет средств на приобретение среды язработки приложения или если капиталовложения, необходимые я создания приложения, не оправдываются его применением. Когда выбор сделан, можно приступать к написанию и тестированию программного обеспечения. В этой главе речь идет о различных типах средств разработки: какими возможностями они обладают и ка-jjjoc результатов позволяют достичь. Кроме того, рассматривается синтаксис языков программирования. Знакомство с ними необходимо, чтобы свободно читать многочисленные листинги, приведенные в данной книге. Сначала будет рассказано о наиболее популярных средствах разработки, обеспечивающих эффективнуто работу с Р1С-микрокон-троллерами. Описать все средства невозможно, поскольку PIC-микроконтроллеры используются практически повсеместно и множество фирм, иногда очень маленьких и мало знакомых широкой публике, предлагают продукты в этой области. Поэтому обзор ограничивается системами, предложенными фирмами Microchip и Ра rallax, которые располагают многочисленными, иногда весьма оригинальными продуктами. АССЕМБЛЕР ИЛИ ЯЗЫКИ ВЫСОКОГО УРОВНЯ Разработка любой компьютерной программы может быть осуществлена с помощью языка низкого уровня (машинного языка, ассемблера) или языка высокого уровня (С, Basic, Pascal). Для PIC-микроконт-роллеров, и особенно входящих в подсемейство PIC 16СХХ, ассемблер - самое лучшее решение, даже если он кажется более трудным вприменении. Действительно, размер памяти, доступный программе в микроконтроллерах этого подсемейства, относительно мал (от 512 до 4 К слов), что делает невозможным размещение большой программы. Программа, написанная на ассемблере, требует минимального объема памяти и позволяет реализовать максимальное количество функций. Напротив, если она создана на языке высокого уровня, то в памяти микроконтроллера может храниться код, соответствующий всего лишь нескольким десяткам или сотням операторов языка. Ь таких языках, как С, Basic или Pascal, имеется множество типов Переменных и обрабатывающих их операторов, что позволяет писать очень компактные исходные тексты программ. Но даже самый простой оператор на языке высокого уровня при компиляции
|
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |